Perpendicular Axis Theorem
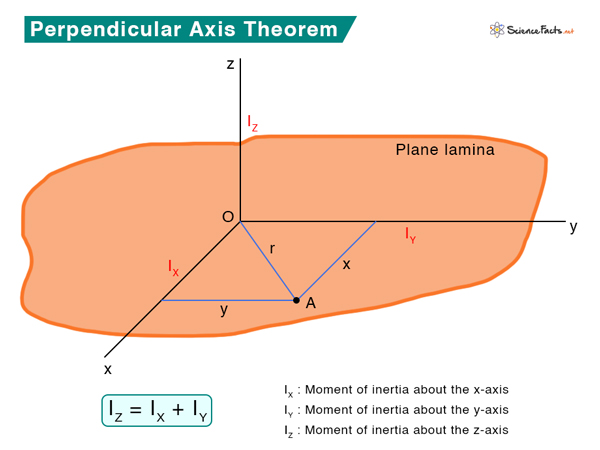
The perpendicular axis theorem establishes a relationship between the moments of inertia about three perpendicular axes. It states, “For any planar rigid body, the moment of inertia about an axis perpendicular to the plane of the body is equal to the sum of the moments of inertia about two perpendicular axes in the plane of the body that intersects the first axis.”
Formula
The equation for the perpendicular axis theorem is given by
IZ = IX + IY
Where IX, IY, and IZ are the moments of inertia about the x-, y-, and z-axis, respectively.
Proof
Consider a plane laminar object whose thickness is negligible, as shown in the image above. It is placed on the XY plane such that point O is the origin of the orthogonal coordinate system x, y, and z-axis. Suppose an infinitesimal mass dm lies at point A at a distance r from the origin. This point is at a distance y from the x-axis and x from the y-axis.
The expressions for the moment of inertia about the three axes are given by
Using Pythagoras’ theorem,
r2 = x2 + y2
Therefore,
IZ =
=> IZ =
=> IZ = IX + IY
Thus, we have proved the perpendicular axis theorem.
Applications
The perpendicular axis theorem is applied to calculate the moment of inertia values about perpendicular axes. One can use this theorem to find the moment of inertia values of a few well-known objects from values given in any standard moment of inertia table. Here are some examples.
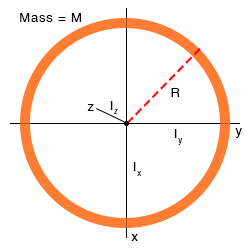
1. Ring
The moment of inertia of a ring of mass M and radius R about the z-axis is
Due to the symmetry of the ring, IX = IY = I. Therefore,
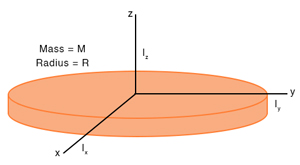
2. Disc
The moment of inertia of a disc of mass M and radius R about the z-axis is given by
Due to the symmetry of the disc, IX = IY = I. Therefore,
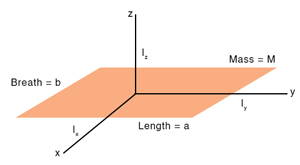
3. Rectangular Section
The moment of inertia of a rectangular section of mass M, length a, and breath b about an axis passing through its center and parallel to its length is
Similarly, the moment of inertia about an axis passing through the center and parallel to the breath is
Using the perpendicular axis theorem
Example Problems
Problem 1. The moment of inertia of a thin uniform rod of mass M and length L about an axis perpendicular to the rod and passing through its center is I. What is the moment of inertia of the rod about an axis in the rod’s plane and perpendicular to it?
Solution
Let the center of the rod be at the origin. Suppose the rod is in the XY plane and along the x-axis. Then, the z-axis is perpendicular to the rod, and the moment of inertia about the z-axis is
IZ = ML2/12
Using the perpendicular axis theorem
IZ = IX + IY
Since the rod is thin, its rotation about its axis can be neglected; that is, IX = 0
Therefore,
IZ = IY
=> IY = ML2/12
Problem 2. Suppose the rod in problem 1 has a mass of 1.5 kg and a length of 70 cm. What are the moments of inertia about the x, y, and z axes?
Solution
Given M = 1.5 kg and L = 70 cm = 0.7 m
The moment of inertia values are
IX = 0
IY = IZ = ML2/12 = (1.5 kg) (0.7 m)/12 = 0.735 kgˑm2
-
References
Article was last reviewed on Friday, July 28, 2023
Related articles




Join our Newsletter
Fill your E-mail Address